主要特征
・无需减速机可实现低速,高推力,轻量化
・无通电时候保持力高
・驱动噪音非常小
・停止的时候由于摩擦力可以做到完全停止(无振动,无发热)
・直接构造机构具有较高的机械应答性(振动⇒动作)
・构造简单,部品点数少,量产时可降低成本
・非磁性材料构成,可在强磁场环境内驱动
・改变材质,粘接材料,可支持用于真空(10 Pa)环境
・TULA的轴自身有润滑的作用,可以兼用作于轨道
用途
・显微镜平台 ・照相机(AF,ZOOM,防振) ・对物物镜平台
・干涉计用小型平台 ・小型机器人 ・产业用闸门
・真空中用平台 ・闸门,管口的流量调节 ・照相机用IR过滤器
・医疗器械用平台 ・监视照相机组件 ・点字用组件
・半导体装置用平台 ・激光束调整组件 ・测量仪器
・超精密小型平台 ・小型喷墨用平台 ・无重力用各种平台
・光学系镜面调节组件 ・小型操纵杆 ・强磁场环境用平台
——————————————————————————————————————————
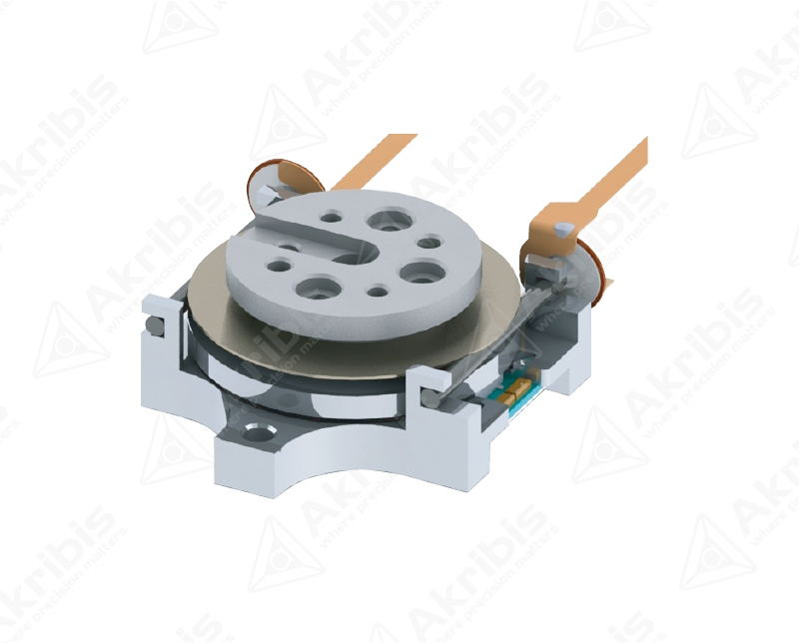
驱动原理
超小型超音波线性电机:TULA是依靠单层型或者多层型压电陶瓷振动的新一代电机。驱动轴的根源部分固定压电陶瓷,对驱动轴进行予压的摩擦体(移动体)夹住主轴,停止的时候,由于摩擦力,会完全停止,不会发生电磁马达那样的微振动,也不会发热。动作原理是,压电陶瓷(振动子)的振动传递给振动轴,这个振动的前进和后退的速度变化,使得移动体(摩擦体)也有微小的进退,基于利用惯性法则的冲击驱动系统为基本原理,以高振动频率(超音波振动)控制精细运动。因此作电机可以平稳运行.对于超小型的物体,能够取得较高的推力和保持力,适合应用于定位用途的小型电机。


1. 当振动压电元子的时候,向上缓慢弯曲,将轴和移动体一起移动。
2. 当振动压电元子的时候,向下迅速弯曲,只有轴被拉出。
移动体(Movemet体)通过缓慢(75%)和快速(25%)占空比的冲击驱动而移动。
由于此运动以每秒间约七万次的速度重复(TULA50),实际上通过累计连续的一点一点的驱动来实现光滑的驱动效果。(每秒频率取决于构造)
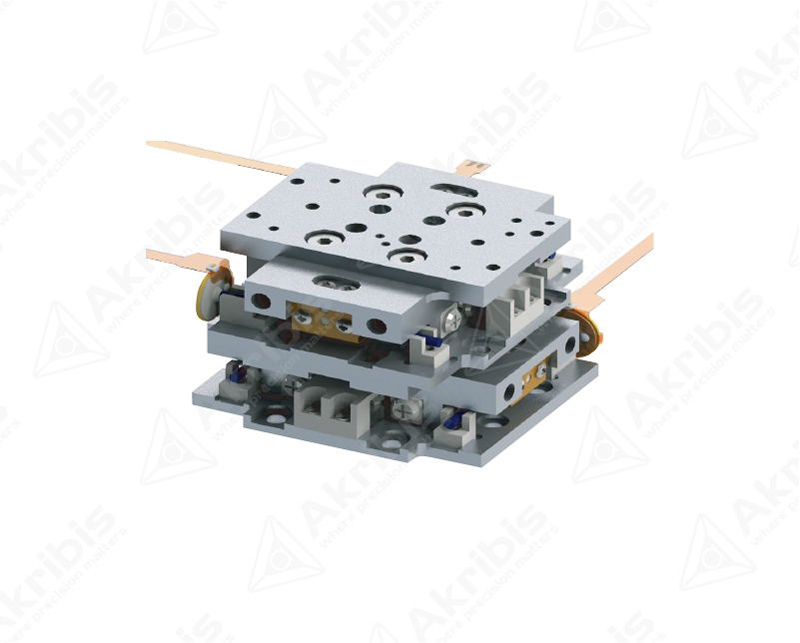
| 1轴平台 | ||||||
| 型号 | XDT35-04 | XDT50-04 | XDT70-10 | XDT70-15 | XMDT50-05 | XCTW70-255 |
| 行程 | 4mm | 4mm | 10mm | 15mm | 5mm | 25mm |
| 分辨率 | OPEN 或者 0.1、0.5、1.0、5.0 μmm ※ | 1.0、5.0μm※ | ||||
| 重复定位精度 | ±3pulse (付编码器时) | |||||
| 最大推力 | 40gf | 70gf | 70gf | 60gf | 60gf | 50gf |
| 保持力 | 150gf | 300gf | 300gf | |||
| 最大速度 | 10㎜/s | |||||
| 重量 | 8g | 11g | 13g | 14g | 5g | 70g |